
[移行] 今までの機体紹介
注意
この記事は旧ブログからの移行記事です。 一部の文言は後から変更しています。
始めに
自己紹介を兼ねて今までのロボットを紹介します。 私は高校時代ロボカップジュニアのサッカーlightweightに出場していました。 以下で紹介するのは主にRCJの機体になります。
1・2号機

初めて作ったロボットです。2021年度RCJ埼玉ブロック大会に出しました。
島忠で買った木板を電ノコとベルトサンダーで加工しました。
この機体に使っているモタドラは専用のアプリケーションがあったり、電流などが制限を超えると、自動的にモーターを止めてエラーを送ってくれる優しいコントローラです。 僕らはエラー線を配線してなかったので、何故動かないのかとキレ散らかしていました。
また、IRセンサとジャイロセンサはmodernroboticのモジュールで、I2Cさえできれば読めるので初心者におすすめです。IRセンサは分解能5°で0~360°の赤外線の距離、角度を、ジャイロセンサは確か分解能1度くらいで同じく0~360°の姿勢角を出力してくれます。
二足歩行(しない)ロボット
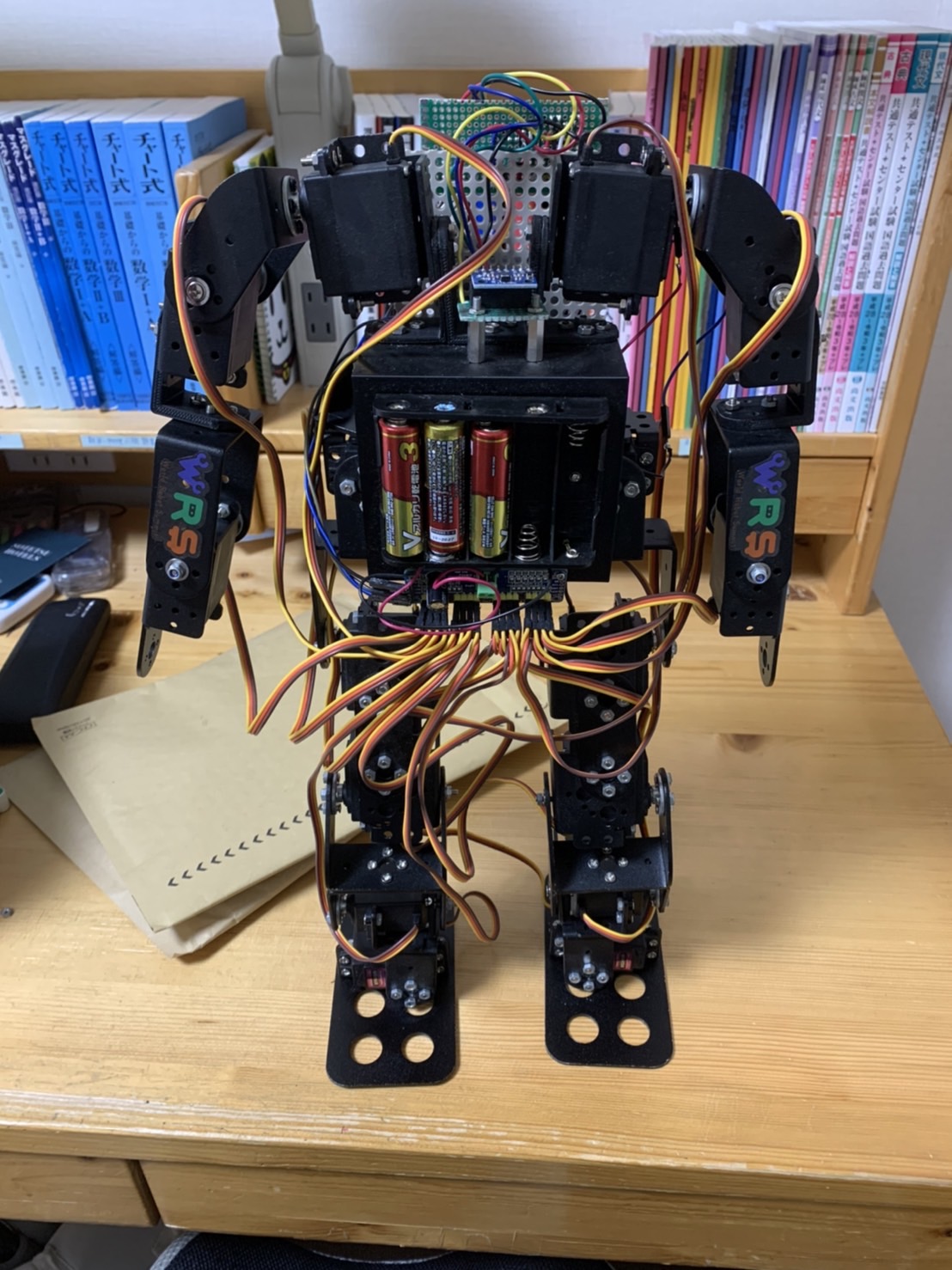
学校で研究テーマを設定し、研究して発表する授業があったので、その題材として作成しました。
フレームはAmazonでセットになってる中華品を買い、電池とマイコンとサーボドライバを載せるところは自分たちで無理やり作りました。
結局RCJと両立できず、このロボットはずっと放置中。
3号機
この機体から設計にfusion360を使い始め、軽量化を意識して設計しました。 木のフレームは図面を印刷した紙を重ねて上からドリルで穴を開けたところに、電ノコの刃を通して気合いで肉抜きしていました。
モーターをダイセンからpololu20Dに変更し、3輪から4輪に増やしました。
戦車(4号機)
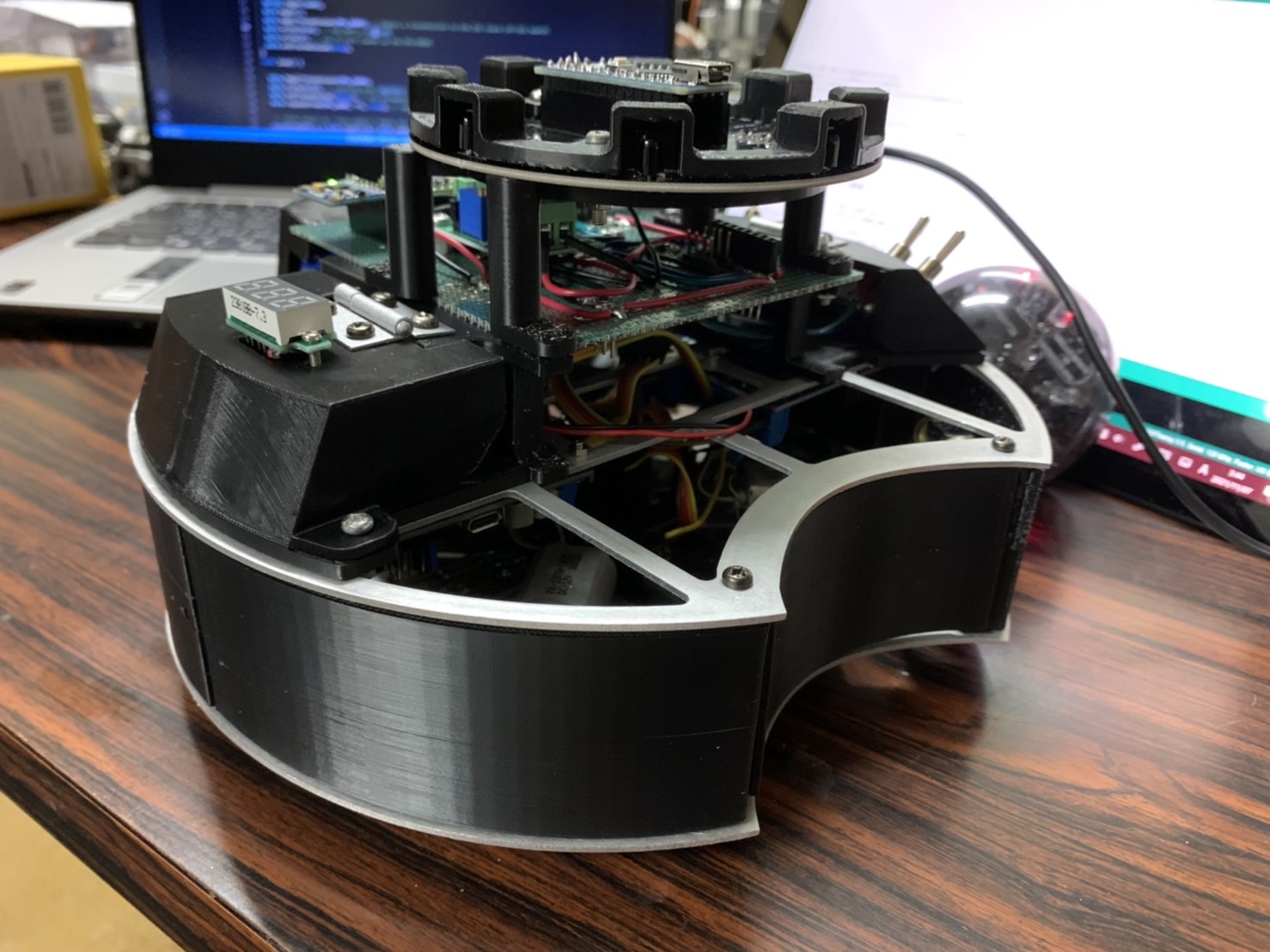
戦車は名前です。 いかついので命名しました。
RCJの練習会に出すつもりだった機体です。
練習会に間に合わせるために、授業時間以外は全部製作に当てていました(楽しかった)。
徹夜して練習会当日の3:00amに作り終え、スイッチをいれた瞬間燃えた時が一番悟りに近かったと思っています。
フレームはt1.5のアルミの切削を切断堂さんに、一部の基板はelecrowさんに発注しました。
UIに手をだしたくて、モニターやスイッチも載せるだけ載せていましたが、肝心のプログラムの開発という段階まで進まなかったため、使われませんでした。 このモニターのつけ方自体は気に入っています。
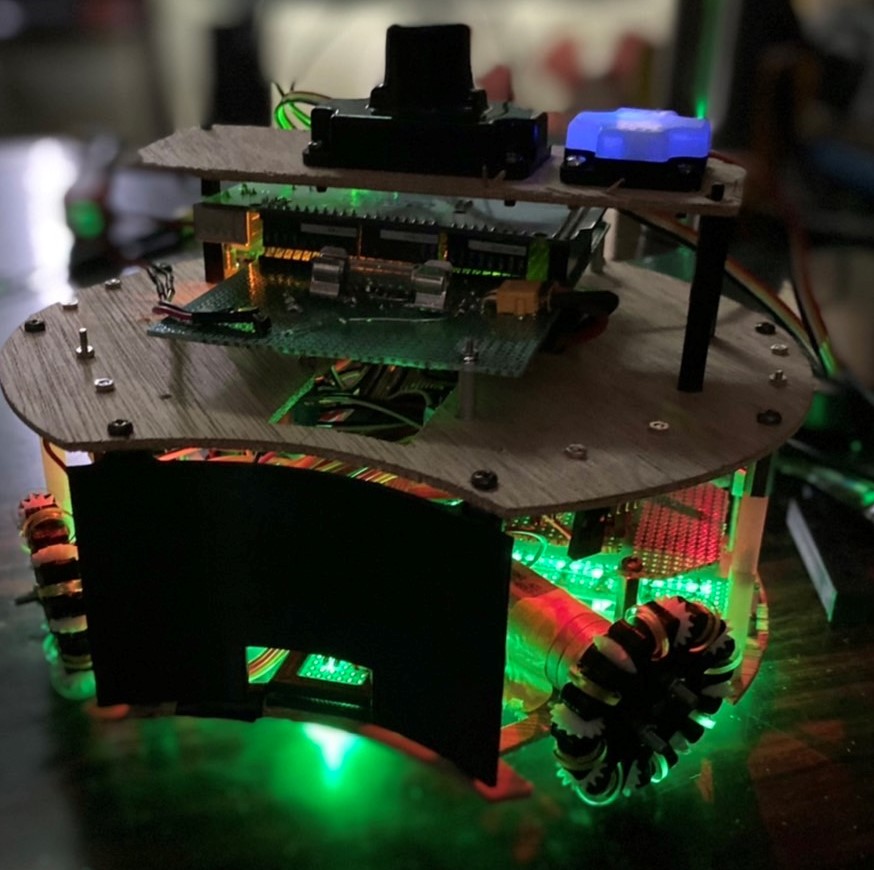
メッシ・川島(5, 6号機)
このころからプログラムの方でディフェンスとオフェンスを分け始めたため、オフェンスをメッシ、ディフェンスを川島と命名しました。
一番現役期間が長く、一番故障が少なかった機体です。 2022年度のブロック大会に出しました。 大会では準優勝でした。
アルミフレームをt1で発注し直し、基板はすべてプリント基板に変更しました。 また、上部ユニットと下部のユニットの接続はフラットケーブル1本で行い、分解しやすさを意識しました。 全体的にシンプルなハードで、ケーブルも少なくてメンテナンスしやすかったと思います。 また、アルミは艶消しスプレーで黒に塗装することで見た目の統一感をだしました。
大会では基本の回り込みやライン動作に専念しました。 プログラムが大きくなってきたので、きれいに書くにはどうしたらよいのかとか、可読性を上げるにはどう書けばいいのかとか、いろいろ考え始めました(その結果きれいになったわけではない)。
ディフェンスは写真の状態に超音波センサをつけ足して、ゴールの前に留まるようにしていたと思います(ボールが前に数秒間止まったら前進する)。
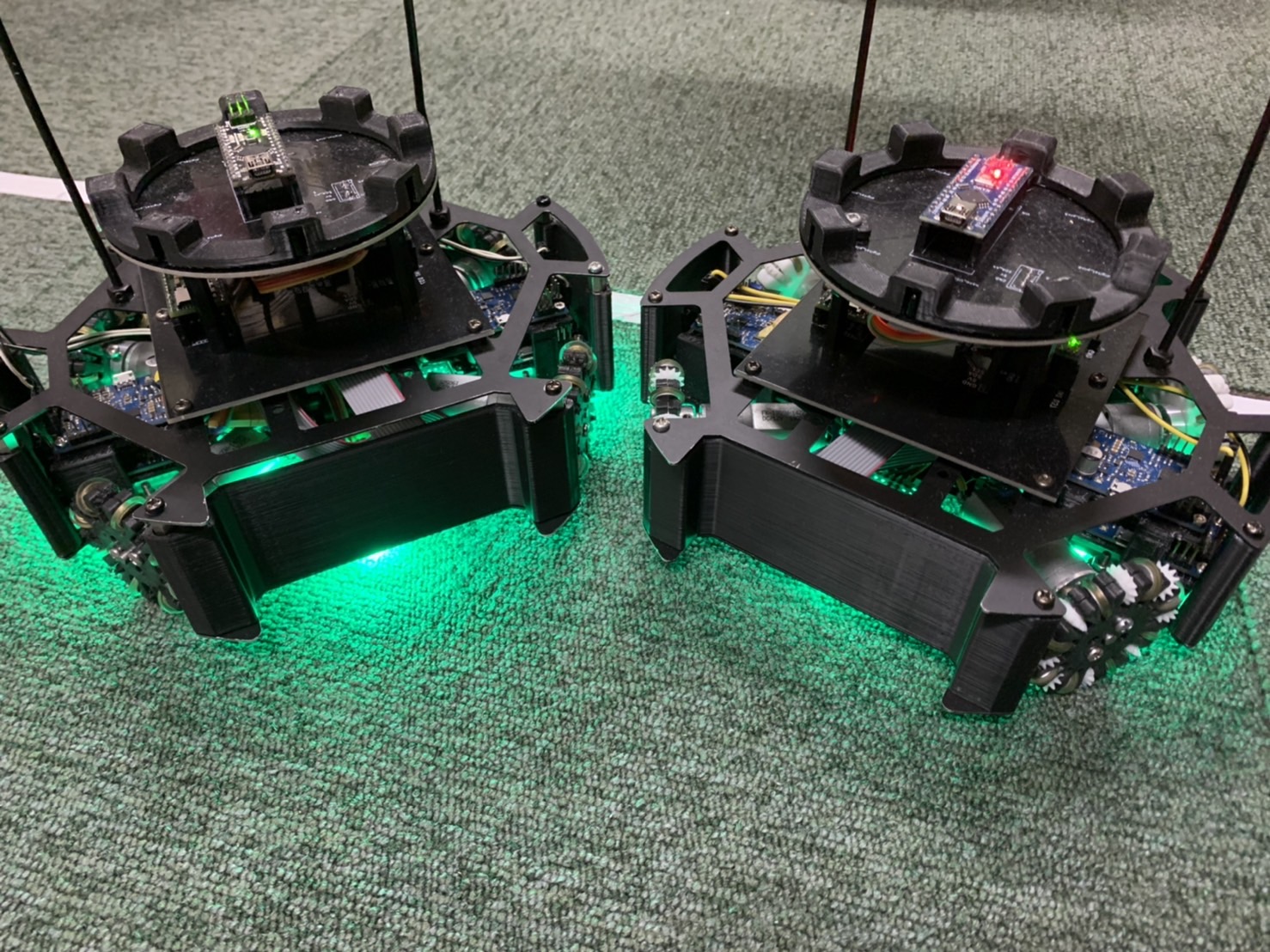
Mk-7,8

Mkはマークと読みます。 ガンダムと一緒。
RCJけいはんな2022大会に出した機体です。
5,6号機にカメラ(pixiy)やUIツール(スイッチ, LED, ブザー, LCD)を追加しました。 また、何を思ったかモタドラをpololu G2に変更しました。
特にカメラの追加が大きく、ディフェンスの精度は非常に上がりました。 カメラボックスの見た目は他のチームと差別化できた1つの点だと思います(チームメイトが設計)。
終わりに
ここまで読んでいただきありがとうございました。 設計や構成などはそこまで突飛でないので、概要だけしか書いてません。 もし質問・要望等あれば遠慮なくTwitterのDM等に投げて頂いて結構です。 (最近Twitter見ないので返信遅いかも。すみません。)
[追記]: 実は2023年度(大学1年)に製作した機体が一応1機体あるので、いつか紹介するかもしれません。